Yongpeng JiangI am a PhD student at the Intelligent Robotic Manipulation (IRM) Lab, part of the Department of Automation at Tsinghua University, where I work on robotic manipulation. My PhD advisor is Prof. Xiang Li. Previously, I received my B.Eng. degree from Tsinghua University in 2023, where I was awarded the National Scholarship (国家奖学金) and named an Outstanding Graduate of Beijing (北京市优秀毕业生). My research aims to develop dexterous robots capable of autonomous, safe, and effective interaction with humans and the physical world. I focus on dexterous grasping and in-hand manipulation, with particular interests in modeling, planning, and control for contact-rich manipulation. I also explore tactile sensing and learning-based methods to enhance the robustness and adaptability of robotic manipulation in unstructured environments. Email / GitHub / Google Scholar / CV |
|
ResearchMy research interests lie in dexterous grasping and in-hand manipulation with multi-fingered hands, as well as planning and control for contact-rich manipulation. |
|
CoorGrasp: Coordinated Contact Control for Adaptive Dexterous Grasping Under UncertaintyMingrui Yu, Yongpeng Jiang, Yongyi Jia, Xiang Li IEEE International Conference on Robotics and Automation (ICRA), 2026 (Oral, top 5%) We introduce a tactile-driven model predictive controller for adaptive dexterous grasp execution, coordinating arm-hand motions and multi-contact forces across approaching and grasping phases to improve grasp success under uncertainty while reducing undesired in-hand object motion. |
|
Guiding Unified Dexterous Grasp Synthesis Across Modes and Scales via Learned Human PriorsMingrui Yu*, Yongpeng Jiang*, Yongyi Jia, Kangchen Lv, Xiangjie Yan, Li Huang, Xiang Li submitted to 10th Annual Conference on Robot Learning (CoRL), 2026 We introduce HUGS, a human-prior-guided framework for unified dexterous grasp synthesis across object scales and contact modes, enabling large-scale grasp generation and real-world autonomous selection from two-finger to bimanual grasps. |
|
Arm-Aware Guided Dexterous Grasp Generation with Arm-Agnostic Grasp ModelsYongyi Jia*, Yongpeng Jiang*, Kangchen Lv, Yi Ren, Xiang Li IEEE Robotics and Automation Letters (RA-L), 2026 We introduce an arm-aware dexterous grasp generation framework that reuses pretrained hand-centric diffusion models while incorporating arm and environment constraints at inference time, enabling efficient feasible grasp synthesis in highly constrained real-world scenarios. |
|
Analyzing Key Objectives in Human-to-Robot Retargeting for Dexterous ManipulationChendong Xin, Mingrui Yu, Yongpeng Jiang, Zhefeng Zhang, Xiang Li IEEE Robotics and Automation Practice (RA-P), 2025 We present a comprehensive real-world comparative study of kinematic retargeting objectives for dexterous manipulation, revealing the significance of key objective terms through ablations and providing practical insights for more effective human-to-robot hand motion transfer. |
|
Robust In-Hand Reorientation with Hierarchical RL-Based Motion Primitives and Model-Based RegraspingYongpeng Jiang, Mingrui Yu, Chen Chen, Yongyi Jia, Xiang Li IEEE Robotics and Automation Practice (RA-P), 2025 We introduce a practical low-cost framework for in-hand cube reorientation, combining RL-trained motion primitives with a high-level switching policy to achieve long-duration continuous manipulation using only a LEAP Hand and a single RGB camera. |
|
A Tactile-Informed Bi-Level Framework with Complementary Motion-Contact Planning and Tracking for Robust Model-Based In-Hand ManipulationYongpeng Jiang, Mingrui Yu, Xinghao Zhu, Masayoshi Tomizuka, Xiang Li submitted to the International Journal of Robotics Research (IJRR), 2025 We introduce a tactile-incorporated bi-level framework for robust model-based dexterous in-hand manipulation, combining contact-implicit MPC for real-time planning with tactile-reactive force-motion control to handle modeling errors, disturbances, and diverse real-world tasks. |
|
Robust In-Hand Reorientation with Hierarchical RL-Based Motion Primitives and Model-Based RegraspingMingrui Yu, Yongpeng Jiang*, Chen Chen, Yongyi Jia, Xiang Li IEEE Robotics and Automation Letters (RA-L), 2024 We introduce a practical kinematic trajectory optimization approach for in-grasp object movement, enabling dexterous fingers to achieve precise, large-range in-hand manipulation while maintaining stable grasps, without pretraining or object geometry information. |
|
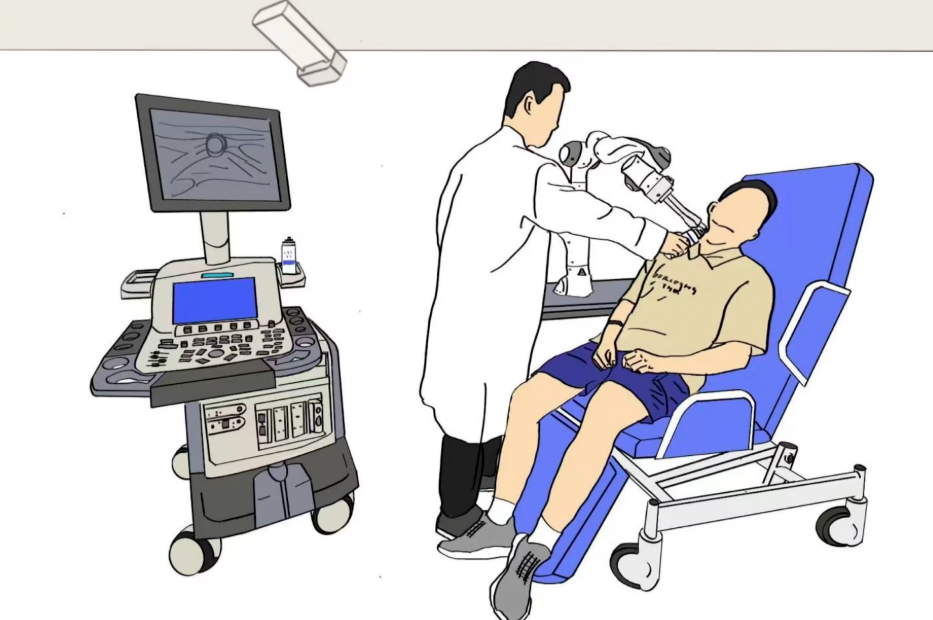
A Unified Interaction Control Framework for Safe Robotic Ultrasound Scanning with Human-Intention-Aware ComplianceXiangjie Yan, Shaqi Luo, Yongpeng Jiang, Mingrui Yu, Chen Chen, Senqiang Zhu, Gao Huang, Shiji Song, and Xiang Li IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024 We introduce a unified human-intention-aware interaction control framework for ultrasound scanning robots, enabling smooth and compliant responses to intended interventions and unintended collisions while maintaining safe and efficient scanning performance. |
|
Contact-Implicit Model Predictive Control for Dexterous In-Hand Manipulation: A Long-Horizon and Robust ApproachYongpeng Jiang, Mingrui Yu, Xinghao Zhu, Masayoshi Tomizuka, Xiang Li IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024 We introduce a model-based framework for long-horizon dexterous in-hand manipulation, using contact-implicit MPC to generate real-time contact plans without predefined contact sequences, separate planning, or pretraining, enabling robust and generalizable object rotation. |
|
Contact-Aware Non-Prehensile Manipulation For Object Retrieval in Cluttered EnvironmentsYongpeng Jiang, Yongyi Jia, Xiang Li IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023 We introduce a contact-aware non-prehensile manipulation framework for cluttered object retrieval, combining improved RRT planning with MPC control to enable a rod-like pusher to retrieve target objects through obstacle removal, avoidance, and contact-face switching. |
|
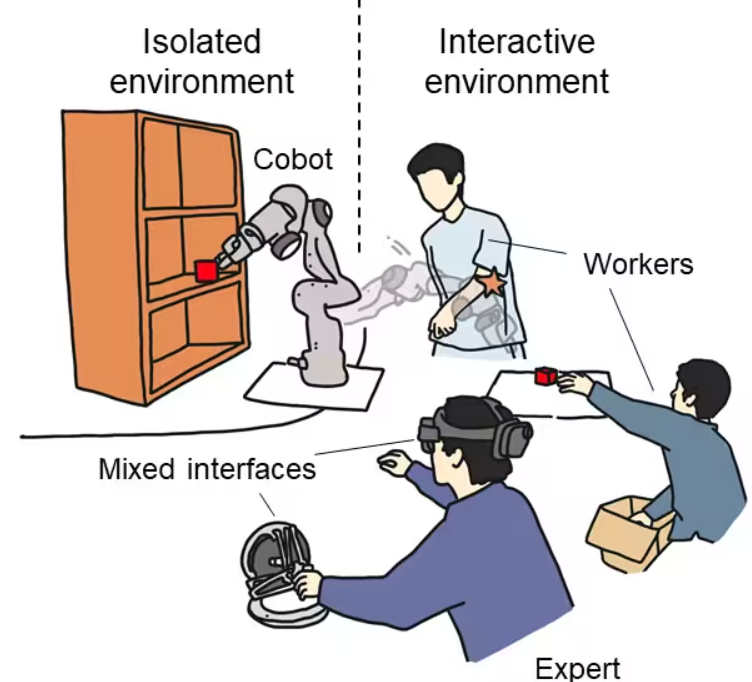
A Complementary Framework for Human–Robot Collaboration with a Mixed AR–Haptic InterfaceXiangjie Yan, Yongpeng Jiang, Chen Chen, Leiliang Gong, Ming Ge, Tao Zhang, and Xiang Li IEEE Transactions on Control Systems Technology (T-CST), 2022 We introduce a complementary human-robot collaboration framework that decouples robot task execution and human null-space intervention, enabling safe expert guidance under unforeseen changes while preserving task efficiency through vision-based adaptive control and DMP-based learning. |
Experiences |
 |
Tsinghua University, China
2023.09 - present Ph.D. Candidate Advisor: Prof. Xiang Li |
|
Tsinghua University, China
2019.08 - 2023.06 Undergraduate Student |
|
Design and source code from Jon Barron's website |